The problem below can be interpreted as describing the interaction of two species with populations x and y.
Carry out the following steps:
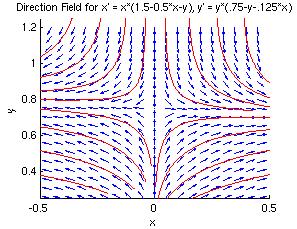
(a) Draw a direction field and describe how the solutions seem to behave.
(b) Find the critical points.
(c) For each critical point find the corresponding linear system. Find the
eigenvalues and eigenvectors of the linear system; classify each critical
point as to type, and determine whether it is asymptotically stable, stable,
or unstable.
(d) Sketch the trajectories in the neighborhood of each critical point.
(e) Compute and plot enough trajectories of the given system to show clearly
the behavior of the solutions.
(f) Determine the limiting behavior of x and y as t
approaches infinity, and interpret the results in terms of the
populations of the two species.
We can use the MATLAB module dirfieldAuto to plot the direction field for this system. The critical points (found in part (b) are marked with red stars.)
>> dirfieldAuto
*-----------------------------------------------------------*
| This module will plot a direction field for an autonomous |
| system of equations x' = f(x,y), y' = g(x,y). |
*-----------------------------------------------------------*
Enter x' as a function of x and y: x' => x*(1.5-0.5*x-y)
Enter y' as a function of x and y" y' => y*(0.75-y-0.125*x)
Enter the smallest x value => -1
Enter the largest x value => 4
Enter the smallest y value => -1
Enter the largest y value => 3
Warning: Divide by zero.
> In dirfieldAuto at 88
Warning: Divide by zero.
> In dirfieldAuto at 89
Warning: Divide by zero.
> In dirfieldAuto at 88
Warning: Divide by zero.
> In dirfieldAuto at 89
>> plot([0 0 2 3],[0 0.75 0.5 0],'rp') % Plot stars at critical points
>>
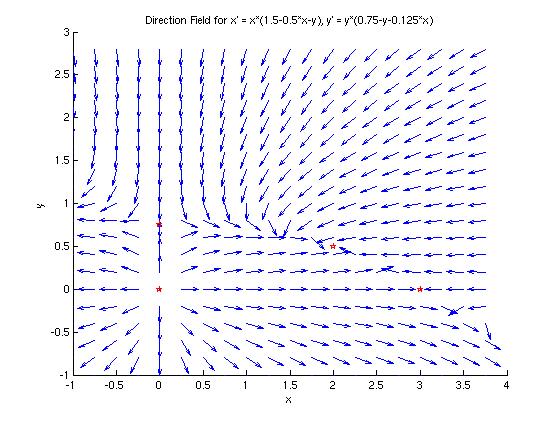
Using basic algebra, we find that the critical points for this system are (0,0), (0, 0.75), (2, 0.5) and (3,0). They are marked with red stars on the direction field in part (a).
The linear system that approximates the non-linear system near the critical point (0,0) is

Because the coefficient matrix is diagonal, we can see that the eigenvalues are &xi1 = 1.5 and &xi2 = 0.75. The eigenvectors are easily shown to be v1 = [1;0] and v2=[0;1]. Because both eigenvalues are real and positive, the origin is an unstable node.
The linear system that approximates the non-linear system near the critical point (0,0.75) is

The MATLAB command 'eig' will find the eigenvalues of the coefficient matrix:
>> [V,D]=eig([0.75 0;-0.09375 -0.75])
V =
0 0.9981
1.0000 -0.0624
D =
-0.7500 0
0 0.7500
>>
Thus, the eigenvectors and eigenvalues of the coefficient matrix are

The eigenvalues are real with opposite sign, so the critical point (0, 0.75) is a saddle point and is unstable.
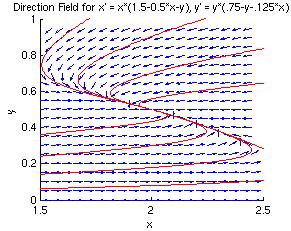
The linear system that approximates the non-linear system near the critical point (2,0.5) is

The MATLAB command 'eig' will find the eigenvalues of the coefficient matrix:
>> [V,D]=eig([-1 -2;-0.0625 -0.5])
V =
-0.9958 0.9463
-0.0911 -0.3232
D =
-1.1830 0
0 -0.3170
>>
Thus, the eigenvectors and eigenvalues of the coefficient matrix are

The eigenvalues are real, distinct, and negative, so the critical point (2, 0.5) is an asymptotically stable node.
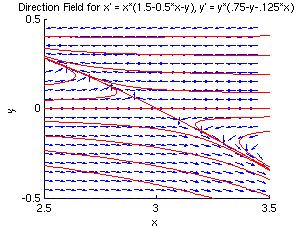
The linear system that approximates the non-linear system near the critical point (3, 0) is

The MATLAB command 'eig' will find the eigenvalues of the coefficient matrix:
>> [V,D]=eig([-1.5 -3;0 0.375])
V =
1.0000 -0.8480
0 0.5300
D =
-1.5000 0
0 0.3750
>>
Thus, the eigenvectors and eigenvalues of the coefficient matrix are

The eigenvalues are real with opposite sign, so the critical point (3, 0) is a saddle point and is unstable.
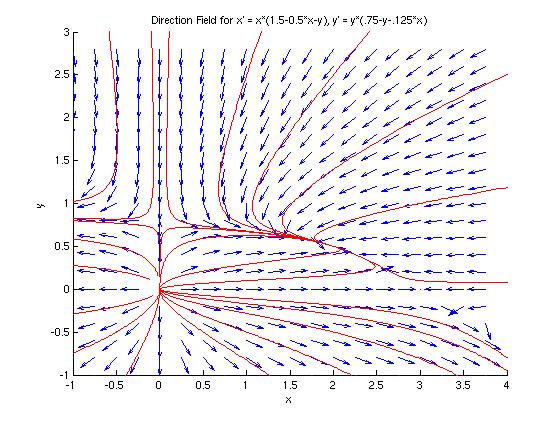
The 'dirfieldAuto' module will plot solution curves if we choose, which allows us to create a phase portrait on top of a direction field. Here 24 curves are plotted to create the phase portrait.
Let's analyze the behavior of the trajectories near the four critical points:
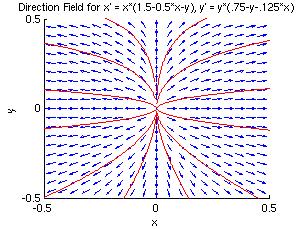
Let's zoom into these four critical points, and look more closely at the phase portraits near them. The four plots below are close-up views of the phase portrait of the non-linear system. Notice how much they look like phase portraits of linear systems.
| Critical Point (0, 0) | Critical Point (0, 0.75) |
|---|---|
| Unstable Node | Unstable Saddle Point |
 |
 |
| Critical Point (2, 0.5) | Critical Point (3, 0) |
| Asymptotically Stable Node | Unstable Saddle Point |
 |
 |
Because we are considering a population modeled by this system of differential equations, we can assume that x and y are always positive quantities, and thus we only need to consider trajectories in the first quadrant of the coordinate plane. In this quadrant, all trajectories approach the critical point of (2, 0.5), which means that for the populations in question, x will approach 2 and y will approach 0.5, regardless of the initial populations.
In the special cases where one or the other initial population is zero, the trajectories stay on the coordinate axes, and approach one of the critical points (0, 0.75) or (3, 0):