Lesson 34: 7.5 Homogeneous Systems with Constant Coefficients
Introduction: Solving Systems
The lesson focuses on solving vector systems in the form
$\vec{x}^{\prime}=A\vec{x}$ where the vector is defined as $\vec{x} =
\begin{bmatrix}x_{1}\\ \dots \\ x_{n}\end{bmatrix}$. The matrix $A$
consists of constant coefficients.
The solution method is very similar to the scalar example
$x^{\prime}=ax$ (or $y^{\prime}=ay$), where the solution involves
exponential functions.
Review: Second Order Linear Equation
Consider the scalar equation:
$$y^{\prime\prime}+5y^{\prime}+6y=0$$
With initial conditions $y(0)=1$ and $y^{\prime}(0)=2$.
Step 1: Characteristic Equation
We solve using the characteristic polynomial: $r^{2}+5r+6=0$.
Factoring yields: $(r+2)(r+3)=0$, resulting in roots $r=-2, -3$.
The general solution is of the form $x=ce^{at}$ (or in this case for y):
$$y=c_{1}e^{-2t}+c_{2}e^{-3t}$$
Using the initial condition $y(0)=1$:
$$1=c_{1}+c_{2}$$
Using the derivative $y^{\prime}=-2c_{1}e^{-2t}-3c_{2}e^{-3t}$ and initial condition $y^{\prime}(0)=2$:
$$2=-2c_{1}-3c_{2}$$
Converting to a System of First-Order Equations
We can turn the previous example into a system of two 1st-order equations.
- Let $x_{1}=y$
- Let $x_{2}=y^{\prime}$
This leads to the system:
- $x_{1}^{\prime}=x_{2}$ (by definition)
- $x_{2}^{\prime}=-6x_{1}-5x_{2}$ (derived from $y^{\prime\prime}=-6y-5y^{\prime}$)
Written in matrix form $\vec{x}^{\prime} = A\vec{x}$:
$$\begin{bmatrix}x_{1}^{\prime}\\
x_{2}^{\prime}\end{bmatrix}=\begin{bmatrix}0&1\\
-6&-5\end{bmatrix}\begin{bmatrix}x_{1}\\ x_{2}\end{bmatrix}$$
This is equivalent to $y^{\prime\prime}+5y^{\prime}+6y=0$. The solution corresponds to the scalar solution found earlier:
- $x_{1}=y=c_{1}e^{-2t}+c_{2}e^{-3t}$
- $x_{2}=y^{\prime}=-2c_{1}e^{-2t}-3c_{2}e^{-3t}$
In vector notation, the solution is:
$$\begin{bmatrix}x_{1}\\
x_{2}\end{bmatrix}=c_{1}e^{-2t}\begin{bmatrix}1\\
-2\end{bmatrix}+c_{2}e^{-3t}\begin{bmatrix}1\\ -3\end{bmatrix}$$
The exponents (-2 and -3) are the roots of the characteristic
equation. The vectors $\begin{bmatrix}1\\-2\end{bmatrix}$ and
$\begin{bmatrix}1\\-3\end{bmatrix}$ must be related to the matrix
$A=\begin{bmatrix}0&1\\ -6&-5\end{bmatrix}$.
Eigenvalues and Eigenvectors
The vectors identified above are eigenvectors associated with the eigenvalues $\lambda=-2$ and $\lambda=-3$.
Finding Eigenvalues
To find the eigenvalues, we solve $\det(A-\lambda I)=0$:
$$\begin{vmatrix}-\lambda&1\\ -6&-5-\lambda\end{vmatrix}=0$$
$$(-\lambda)(-5-\lambda) - (-6)(1) = 0 \rightarrow \lambda^{2}+5\lambda+6=0$$
This characteristic equation yields roots $\lambda=-2$ and $\lambda=-3$.
Finding Eigenvectors
We solve $(A-\lambda I)\vec{v}=\vec{0}$.
Case 1: $\lambda = -2$
$$A - (-2)I = \begin{bmatrix}2&1\\ -6&-3\end{bmatrix}
\rightarrow \begin{bmatrix}2&1\\ 0&0\end{bmatrix}$$ Equation:
$2x_1 + x_2 = 0 \rightarrow x_2 = -2x_1$. Eigenvector:
$\vec{v}=\begin{bmatrix}1\\ -2\end{bmatrix}$.
Case 2: $\lambda = -3$
$$A - (-3)I = \begin{bmatrix}3&1\\ -6&-2\end{bmatrix}
\rightarrow \begin{bmatrix}3&1\\ 0&0\end{bmatrix}$$
Eigenvector: $\vec{v}=\begin{bmatrix}1\\ -3\end{bmatrix}$.
General Solution and Phase Diagrams
The general solution of $\vec{x}^{\prime}=A\vec{x}$ is given by:
$$\vec{x}=c_{1}e^{\lambda_{1}t}\vec{v}_{1}+c_{2}e^{\lambda_{2}t}\vec{v}_{2}+\dots+c_{n}e^{\lambda_{n}t}\vec{v}_{n}$$
For our specific example:
$$\vec{x}=c_{1}e^{-2t}\begin{bmatrix}1\\ -2\end{bmatrix}+c_{2}e^{-3t}\begin{bmatrix}1\\ -3\end{bmatrix}$$
Phase Diagram (Phase Portrait)
While we can graph $x_1(t)$ and $x_2(t)$ individually, we often get
more information from a graph of $x_1$ vs $x_2$. This is called a phase diagram (similar to a slope field).
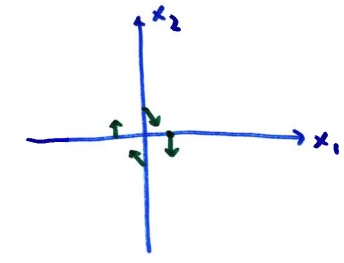
Using $\vec{x}^{\prime}=\begin{bmatrix}0&1\\
-6&-5\end{bmatrix}\vec{x}$, we can calculate tangent vectors at
specific points:
- At $\vec{x}=\begin{bmatrix}1\\ 0\end{bmatrix}$, $\vec{x}^{\prime}=\begin{bmatrix}0\\ -6\end{bmatrix}$ (Arrow points downward).
- At $\vec{x}=\begin{bmatrix}0\\ 1\end{bmatrix}$, $\vec{x}^{\prime}=\begin{bmatrix}1\\ -5\end{bmatrix}$.
Qualitative Sketch: Nodal Sink
It is easy to sketch qualitatively using the general solution.
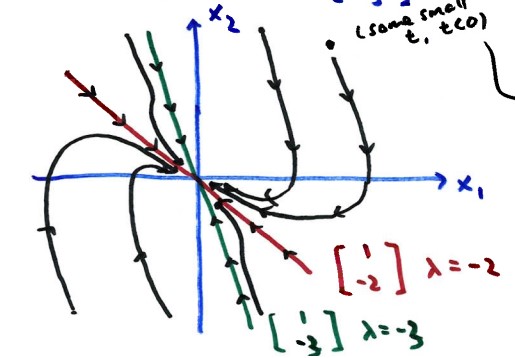
Figure Description:
Phase diagram sketch for a Nodal Sink. The origin is the center. Two
lines pass through the origin corresponding to eigenvectors v1 (1, -2)
and v2 (1, -3). Arrows on all trajectories point inward toward the
origin. Trajectories tangentially approach the line of the eigenvector
associated with the eigenvalue closest to zero (-2).
- As $t \to \infty$, $\vec{x} \to \vec{0}$ (the origin). Solutions go to the origin as $t$ increases.
- If
$t$ is a large positive number, $e^{-2t}$ is significantly larger than
$e^{-3t}$ (since -2 is closer to 0 than -3). Therefore, solutions
approach the origin along the eigenvector attached to $\lambda=-2$.
- If
$t$ is a large negative number, $e^{-3t}$ dominates $e^{-2t}$.
Solutions coming from infinity are parallel to the eigenvector for
$\lambda=-3$.
Solutions that start exactly on the eigenvector lines remain on
those lines, moving toward the origin over time. Generally,
trajectories initially follow the direction of the "stronger" (more
negative) eigenvalue vector, then curve to follow the "weaker" (less
negative) eigenvalue vector on the way to the origin.
Classification: The origin here is called a Nodal Sink because trajectories are attracted to it.
Nodal Source and Saddle Points
If both eigenvalues are positive, the qualitative picture is the
same, but the arrows point in the opposite direction (away from the
origin). The origin is a Nodal Source.
Example: Saddle Point
Consider $\vec{x}^{\prime}=\begin{bmatrix}1&2\\ 2&1\end{bmatrix}\vec{x}$.
- Eigenvalues: $\lambda_1 = -1$ and $\lambda_2 = 3$.
- Eigenvectors:
$\vec{v}_1 = \begin{bmatrix}1\\ -1\end{bmatrix}$ (for -1) and
$\vec{v}_2 = \begin{bmatrix}1\\ 1\end{bmatrix}$ (for 3).
- General Solution: $\vec{x}=c_{1}e^{-t}\begin{bmatrix}1\\ -1\end{bmatrix}+c_{2}e^{3t}\begin{bmatrix}1\\ 1\end{bmatrix}$.
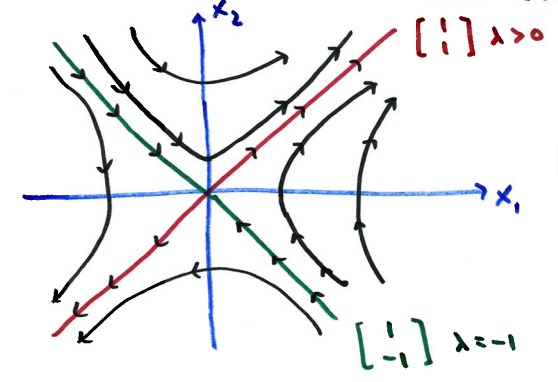
Figure Description:
Phase diagram of a Saddle Point. The origin is the center. One
eigenvector line (1, -1) has arrows pointing IN toward the origin. The
other eigenvector line (1, 1) has arrows pointing OUT away from the
origin. Trajectories form hyperbolas approaching the origin along the
stable eigenvector and curving away along the unstable eigenvector.
The solution $\vec{x}$ never reaches the origin unless we start
exactly on the eigenvector associated with the negative eigenvalue
($\lambda=-1$). Because the eigenvalues have opposite signs (one
positive, one negative), the origin is classified as a Saddle Point. Trajectories approach along the line of the negative eigenvalue and move away along the line of the positive eigenvalue.