Lesson 35 (7.6)
7.6 Complex Eigenvalues
Consider the system of differential equations:
$$\vec{x}'=A\vec{x}$$
where $A$ has **complex eigenvalues**.
Example 1
For example, consider the system:
$$\vec{x}'=\begin{pmatrix}0&-1\\ 1&0\end{pmatrix}\vec{x}$$
The characteristic equation is found by calculating the determinant of $(A - \lambda I)$:
$$\begin{vmatrix}-\lambda&-1\\ 1&-\lambda\end{vmatrix}=\lambda^{2}+1=0$$
This yields the eigenvalues $\lambda = \pm i$.
Observing the **direction field** gives clues about the solution:
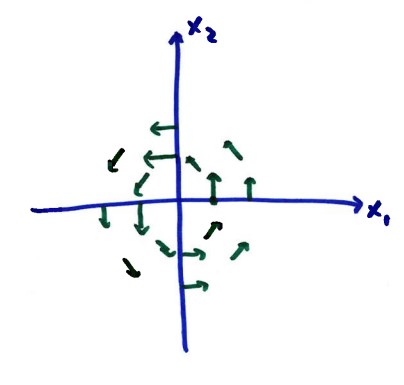
For $\vec{x}=\begin{pmatrix}1\\ 0\end{pmatrix}$,
$\vec{x}'=\begin{pmatrix}0&-1\\
1&0\end{pmatrix}\begin{pmatrix}1\\
0\end{pmatrix}=\begin{pmatrix}0\\ 1\end{pmatrix}$.
For
$\vec{x}=\begin{pmatrix}0\\ 1\end{pmatrix}$,
$\vec{x}'=\begin{pmatrix}0&-1\\
1&0\end{pmatrix}\begin{pmatrix}0\\
1\end{pmatrix}=\begin{pmatrix}-1\\ 0\end{pmatrix}$.
The direction field shows that the solutions are **circles (ovals)**.
- Each component of the solution is **periodic**.
- This suggests the solutions involve **sines and cosines**.
Solving for Eigenvectors
The form of a complex solution is $\vec{x}(t) = e^{\lambda t}\vec{v}$.
We need the eigenvector $\vec{v}$ for $\lambda=i$ (and its conjugate $\vec{\bar{v}}$ for $\lambda=-i$).
Solve the equation $(A-\lambda I)\vec{v}=\vec{0}$ for $\lambda=i$:
$$\begin{pmatrix}-i&-1 & | & 0\\
1&-i & | & 0\end{pmatrix} \xrightarrow{iR_{2}+R_{1}}
\begin{pmatrix}0&0 & | & 0\\ 1&-i & | &
0\end{pmatrix}$$
The second row implies $v_1 - i v_2 = 0$, so $v_1 = i v_2$. If we set $v_2=1$, then $v_1=i$.
The eigenvector is **complex**:
$$\vec{v}=\begin{pmatrix}i\\ 1\end{pmatrix}$$
By repeating the procedure (or using the property of complex conjugates), the eigenvector for $\lambda=-i$ is:
$$\vec{v}=\begin{pmatrix}-i\\ 1\end{pmatrix}$$
The eigenvalue/eigenvector pairs are:
$$\lambda = i \Rightarrow \vec{v}=\begin{pmatrix}i\\
1\end{pmatrix} \quad \text{and} \quad \lambda = -i \Rightarrow
\vec{v}=\begin{pmatrix}-i\\ 1\end{pmatrix}$$
These are always **complex conjugate pairs** ($\lambda$ and
$\bar{\lambda}$, $\vec{v}$ and $\vec{\bar{v}}$). We can never have an
odd number of complex eigenvalues.
Complex Solutions and Real Parts
Solution 1 ($\vec{x}^{(1)}$)
Using $\lambda=i$ and $\vec{v}=\begin{pmatrix}i\\ 1\end{pmatrix}$:
$$\vec{x}^{(1)}=e^{it}\begin{pmatrix}i\\ 1\end{pmatrix}$$
Using Euler's formula, $e^{it}=\cos(t)+i\sin(t)$:
$$\vec{x}^{(1)}=(\cos(t)+i\sin(t))\begin{pmatrix}i\\ 1\end{pmatrix}$$
$$\vec{x}^{(1)}=\begin{pmatrix}i\cos(t)-\sin(t)\\ \cos(t)+i\sin(t)\end{pmatrix}$$
Separating the real and imaginary parts:
$$\vec{x}^{(1)} =
\underbrace{\begin{pmatrix}-\sin(t)\\ \cos(t)\end{pmatrix}}_{\text{Real
part } \vec{u}} + i\underbrace{\begin{pmatrix}\cos(t)\\
\sin(t)\end{pmatrix}}_{\text{Imaginary part } \vec{w}}$$
Solution 2 ($\vec{x}^{(2)}$)
Using $\lambda=-i$ and $\vec{v}=\begin{pmatrix}-i\\ 1\end{pmatrix}$:
$$\vec{x}^{(2)}=e^{-it}\begin{pmatrix}-i\\ 1\end{pmatrix}$$
Since $\cos(-t)=\cos(t)$ and $\sin(-t)=-\sin(t)$, $e^{-it}=\cos(t)-i\sin(t)$:
$$\vec{x}^{(2)}=(\cos(t)-i\sin(t))\begin{pmatrix}-i\\ 1\end{pmatrix}$$
$$\vec{x}^{(2)}=\begin{pmatrix}-i\cos(t)-\sin(t)\\ \cos(t)-i\sin(t)\end{pmatrix}$$
$$\vec{x}^{(2)}=\begin{pmatrix}-\sin(t)\\ \cos(t)\end{pmatrix} + i\begin{pmatrix}-\cos(t)\\ -\sin(t)\end{pmatrix}$$
Note that $\vec{x}^{(2)}$ is the **complex conjugate** of $\vec{x}^{(1)}$:
$$\vec{x}^{(2)} = \begin{pmatrix}-\sin(t)\\
\cos(t)\end{pmatrix} - i\begin{pmatrix}\cos(t)\\ \sin(t)\end{pmatrix} =
\vec{u} - i\vec{w}$$
This is a complex conjugate pair again.
Fundamental Real Solutions
We want the solutions to be **real-valued** (no $i$).
The real and imaginary parts of $\vec{x}^{(1)}$ are:
$$\vec{u}(t)=\begin{pmatrix}-\sin(t)\\
\cos(t)\end{pmatrix} \quad \text{and} \quad
\vec{w}(t)=\begin{pmatrix}\cos(t)\\ \sin(t)\end{pmatrix}$$
It can be verified that $\vec{u}(t)$ and $\vec{w}(t)$ are both
real-valued solutions to $\vec{x}'=\begin{pmatrix}0&-1\\
1&0\end{pmatrix}\vec{x}$:
$$\vec{u}'(t)=\begin{pmatrix}-\cos(t)\\
-\sin(t)\end{pmatrix}$$ $$A\vec{u}(t) = \begin{pmatrix}0&-1\\
1&0\end{pmatrix}\begin{pmatrix}-\sin(t)\\
\cos(t)\end{pmatrix}=\begin{pmatrix}-\cos(t)\\ -\sin(t)\end{pmatrix}$$
$$\text{Since } \vec{u}' = A\vec{u}, \text{ it is a solution.}$$
They are also **linearly independent**. The Wronskian $W$ is:
$$W= \begin{vmatrix}-\sin(t) & \cos(t)\\ \cos(t)
& \sin(t)\end{vmatrix} = (-\sin(t))(\sin(t)) - (\cos(t))(\cos(t)) =
-(\sin^2(t) + \cos^2(t)) = -1 \ne 0$$
Therefore, the **real and imaginary parts** of either complex solution form the **fundamental solutions**.
General Solution (Example 1)
The general solution is a linear combination of the fundamental solutions:
$$\vec{x}(t)=c_{1}\begin{pmatrix}-\sin(t)\\
\cos(t)\end{pmatrix}+c_{2}\begin{pmatrix}\cos(t)\\
\sin(t)\end{pmatrix}$$
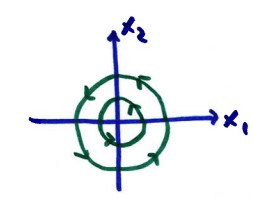
In the phase plane ($x_1$ vs. $x_2$), the solutions are circles or ovals. The origin is a **center**.
Example 2: Spiral Source/Sink
Example 2
Consider another system:
$$\vec{x}'=\begin{pmatrix}1&1\\ -1&1\end{pmatrix}\vec{x}$$
The eigenvalues and eigenvectors are:
$$\lambda=1 \pm i \quad \text{and} \quad \vec{v}=\begin{pmatrix}1\\
i\end{pmatrix}, \begin{pmatrix}1\\ -i\end{pmatrix}$$
We form one complex solution using $\lambda=1+i$ and $\vec{v}=\begin{pmatrix}1\\ i\end{pmatrix}$:
$$\vec{x}^{(1)}=e^{(1+i)t}\begin{pmatrix}1\\ i\end{pmatrix}$$
Using $e^{(1+i)t} = e^t e^{it} = e^t(\cos(t)+i\sin(t))$:
$$\vec{x}^{(1)}=e^{t}(\cos(t)+i\sin(t))\begin{pmatrix}1\\ i\end{pmatrix}$$
$$\vec{x}^{(1)}=e^{t}\begin{pmatrix}\cos(t)+i\sin(t)\\ i\cos(t)-\sin(t)\end{pmatrix}$$
Separating into real and imaginary parts gives the fundamental solutions ($\vec{u}$ and $\vec{w}$):
$$\vec{x}^{(1)}=e^{t}\begin{pmatrix}\cos(t)\\ -\sin(t)\end{pmatrix}+i
e^{t}\begin{pmatrix}\sin(t)\\ \cos(t)\end{pmatrix}$$
The two fundamental solutions are:
$$\vec{x}^{(A)} = e^{t}\begin{pmatrix}\cos(t)\\ -\sin(t)\end{pmatrix}
\quad \text{and} \quad \vec{x}^{(B)} = e^{t}\begin{pmatrix}\sin(t)\\
\cos(t)\end{pmatrix}$$
General Solution and Phase Plane (Example 2)
The general solution is:
$$\vec{x}=c_{1}e^{t}\begin{pmatrix}\cos(t)\\
-\sin(t)\end{pmatrix}+c_{2}e^{t}\begin{pmatrix}\sin(t)\\
\cos(t)\end{pmatrix}$$
The term $e^{t}$ causes the ovals to **grow** as $t$ increases, resulting in **spirals**.
In this case, since the real part of the eigenvalue ($\alpha=1$) is **positive**:
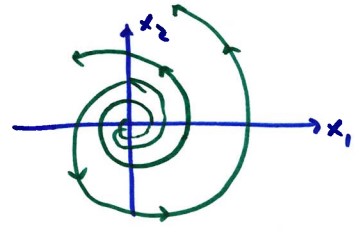
- The origin is a **Spiral Source** (spirals move outward as $t \to \infty$).
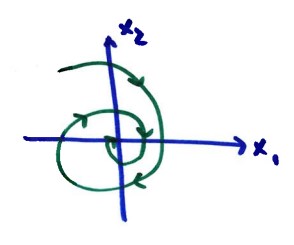
- If the real part was **negative** ($\alpha < 0$), the origin
would be a **Spiral Sink** (spirals move inward as $t \to \infty$).
- The $e^{\alpha t}$ factor comes from the **real part** of the complex eigenvalues ($\lambda = \alpha \pm i\beta$).
7.8 Repeated Eigenvalues
Case 1: Complete Matrix (Diagonalizable)
Consider the system:
$$\vec{x}'=\begin{pmatrix}1&0\\ 0&1\end{pmatrix}\vec{x}$$
The eigenvalue is $\lambda=1$, which has an **algebraic multiplicity of two**.
The eigenvector equation $(A-\lambda I)\vec{v}=\vec{0}$ is:
$$\begin{pmatrix}0&0\\ 0&0\end{pmatrix}\vec{v}=\vec{0} \quad
\text{where } \vec{v}=\begin{pmatrix}v_{1}\\ v_{2}\end{pmatrix}$$
Both $v_1$ and $v_2$ are free variables. The general form of the eigenvector is:
$$\vec{v}=\begin{pmatrix}v_{1}\\
v_{2}\end{pmatrix}=v_{1}\begin{pmatrix}1\\
0\end{pmatrix}+v_{2}\begin{pmatrix}0\\ 1\end{pmatrix}$$
We get **two linearly independent
eigenvectors** ($\begin{pmatrix}1\\ 0\end{pmatrix}$ and
$\begin{pmatrix}0\\ 1\end{pmatrix}$). The **geometric multiplicity is
two**.
If **algebraic multiplicity = geometric multiplicity**, the matrix is called **complete** (or diagonalizable).
The solution is formed normally:
$$\vec{x}=c_{1}e^{t}\begin{pmatrix}1\\ 0\end{pmatrix}+c_{2}e^{t}\begin{pmatrix}0\\ 1\end{pmatrix}$$
Case 2: Defective Matrix (Incomplete)
The previous case produces a phase plane portrait called a **star node**.
Now, let's look at a different system:
$$\vec{x}'=\begin{pmatrix}1&1\\ 0&1\end{pmatrix}\vec{x}$$
The eigenvalue is $\lambda=1$ (repeated), so the **algebraic multiplicity is two**.
The eigenvector equation $(A-\lambda I)\vec{v}=\vec{0}$ is:
$$\begin{pmatrix}0&1 & | & 0\\ 0&0 & | & 0\end{pmatrix}\vec{v}=\vec{0}$$
The first row implies $v_2 = 0$. The general form of the eigenvector
is $\vec{v}=\begin{pmatrix}v_{1}\\
0\end{pmatrix}=v_{1}\begin{pmatrix}1\\ 0\end{pmatrix}$.
We only find **one linearly independent eigenvector**
($\begin{pmatrix}1\\ 0\end{pmatrix}$). The **geometric multiplicity is
one**.
If **geometric multiplicity < algebraic multiplicity**, the matrix is **defective** (or incomplete).
The first solution is:
$$\vec{x}^{(1)}=e^{\lambda t}\vec{v}=e^{t}\begin{pmatrix}1\\ 0\end{pmatrix}$$
A second, linearly independent solution ($\vec{x}^{(2)}$) must be found using a generalized eigenvector.
End of Lesson 35 (7.6 & 7.8)