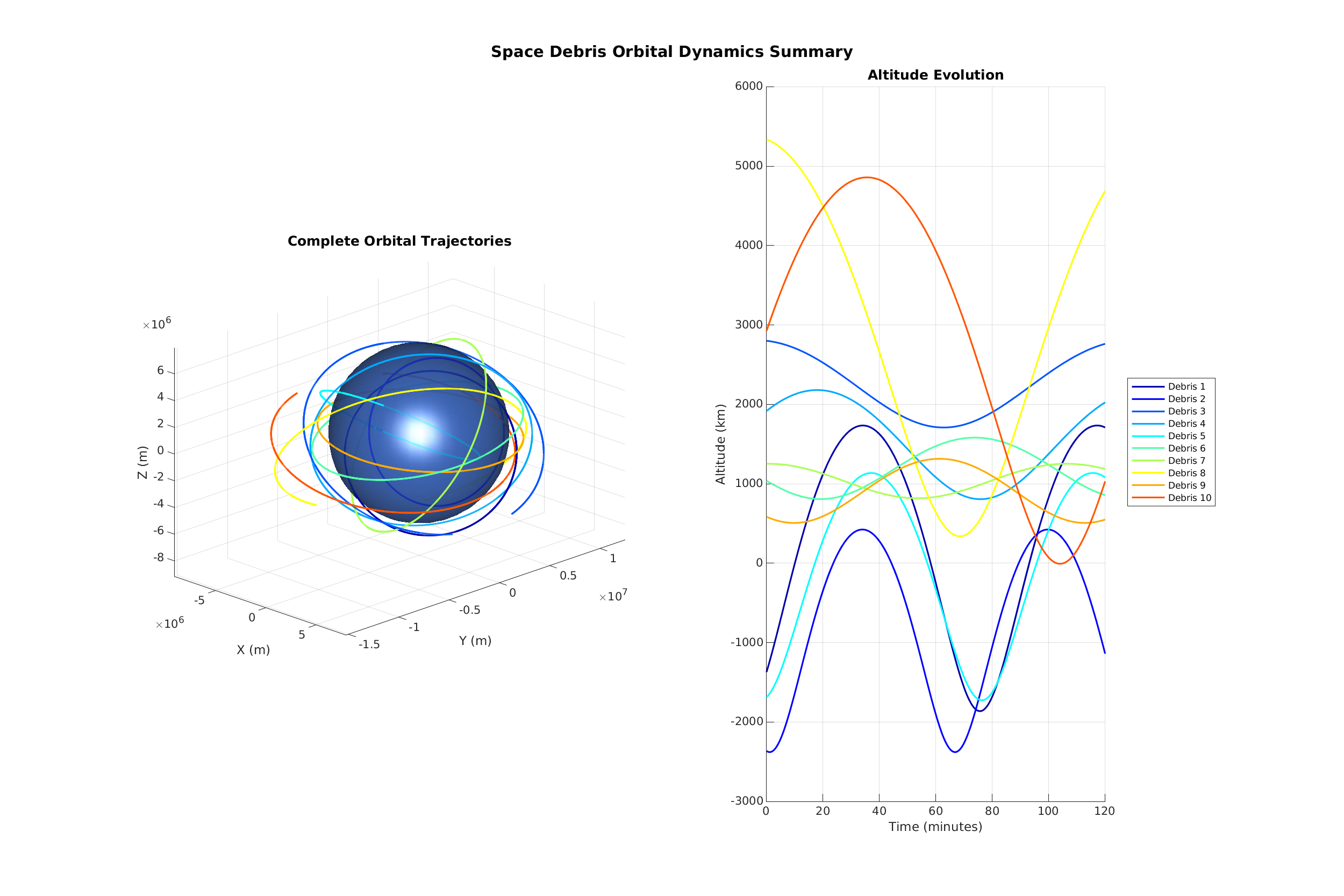
space_debris_simulation.m
Simulates orbital dynamics of 10 debris objects around Earth under gravitational force. Random initial conditions with varying altitudes (300–2000 km), inclinations, and eccentricities.
Method: Numerical integration of Newton's equations in 3D. 2-hour simulation, 10s time step.
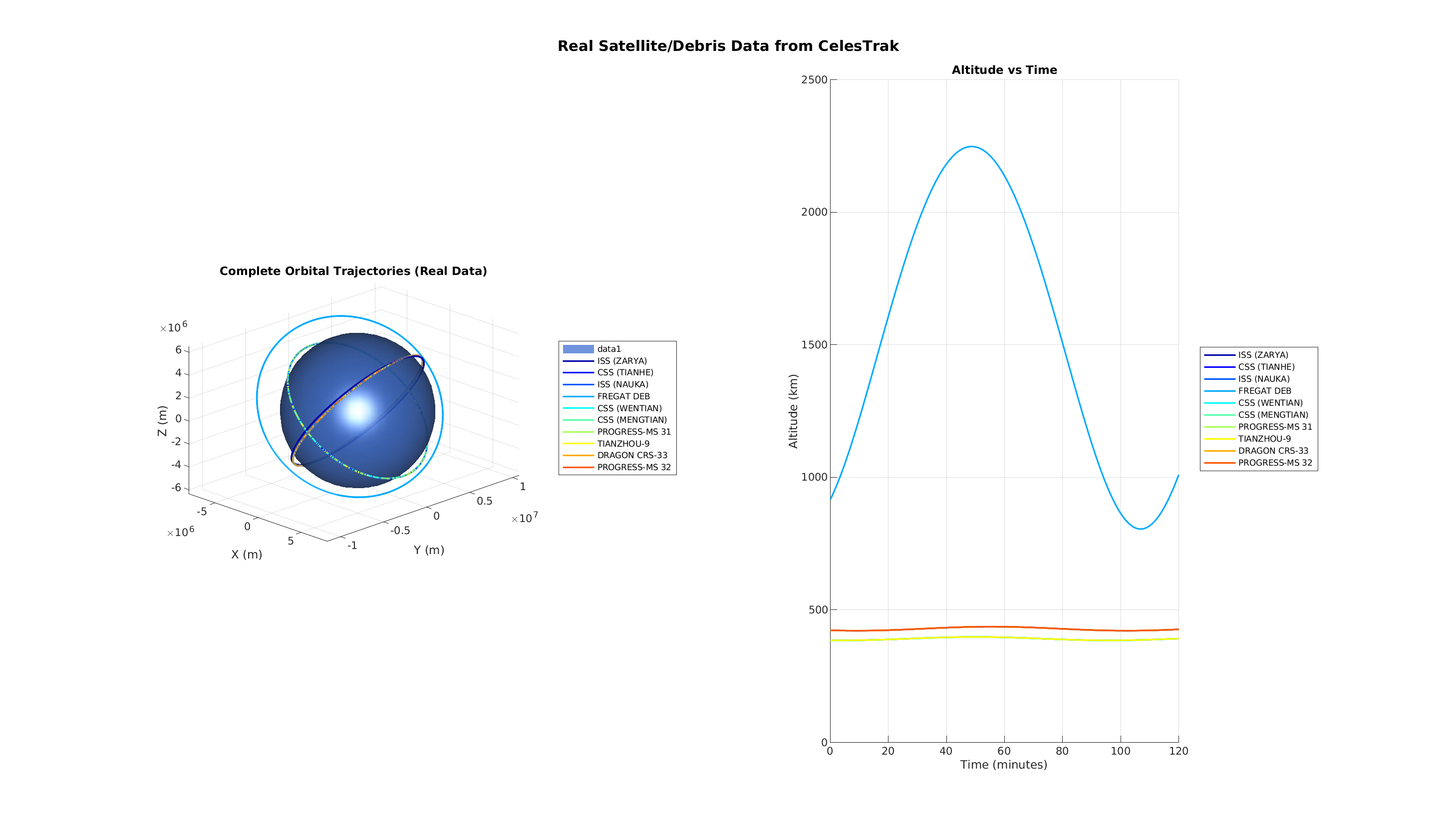
space_debris_real_data.m
Loads real satellite orbital data from TLE (Two-Line Element) format files and propagates orbits using Keplerian elements. 3D visualization of real satellite orbits.
Dataset: iss_tle_data.txt (source: CelesTrak).
space_debris_large_dataset.m
Processes and visualizes a large TLE dataset (~14,000+ active satellites). Subsamples 50 for animation and 200 for full trajectory output suitable for operator learning.
Dataset: active_satellites_full.txt (source: CelesTrak active satellites catalog). 2-hour simulation, 15s time step.